軸受内の転動体の周方向位置が結果に影響する可能性があるため、角度によって最初の転動体位置を定義するオプションが用意されています。カスタム角度が必要な場合は、 -ボタンを使用して入力することができます。
-ボタンを使用して入力することができます。
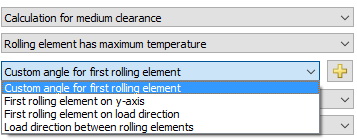
選択 "転動体の初期位置 荷重方向" では、角度の定義にラジアル変位を使用します。純粋なモーメント荷重の場合、角度はゼロに設定されます。ほとんどの場合、この設定は最大接触応力と最低寿命につながります。
"転動体間の荷重方向" では、角度の定義にラジアル変位を使用し、ピッチ角の半分を追加します。純粋なモーメント荷重の場合、角度はゼロに設定されます。
このオプションは、弾性外輪を持つトラックローラーの計算にはまだ使用できません。